
















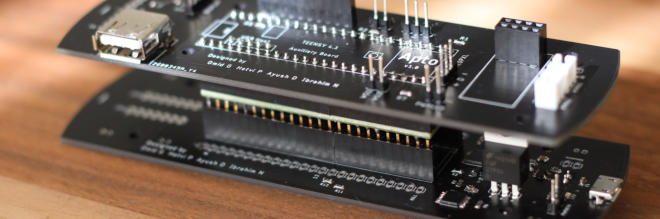
Includes a unique stacked PCB design that accommodates
the hardware necessary to bring Apto to life, while remaining
small enough to fit within the footprint of the robot.


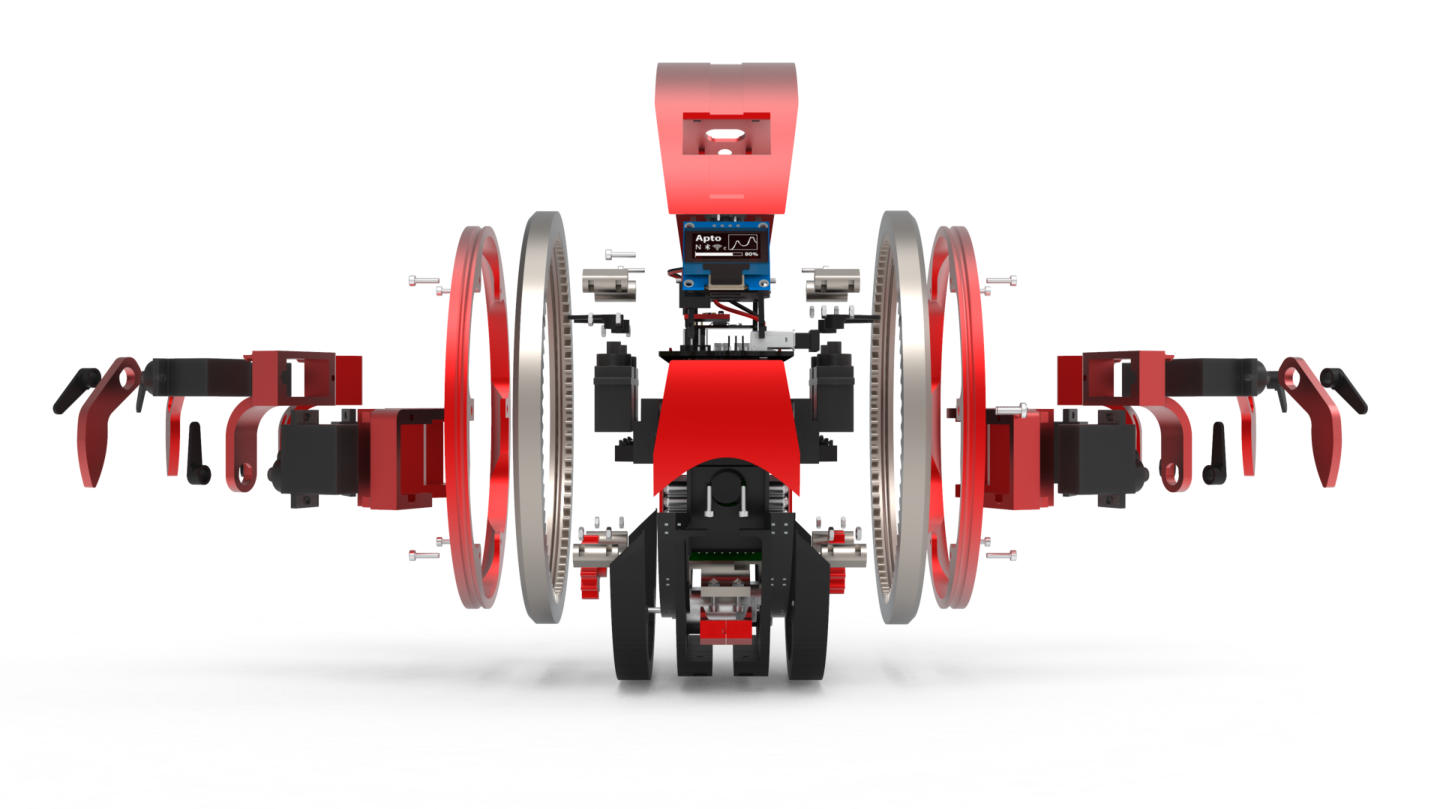
Made up of over 50 custom components, designed for
Aptos unique feature set.

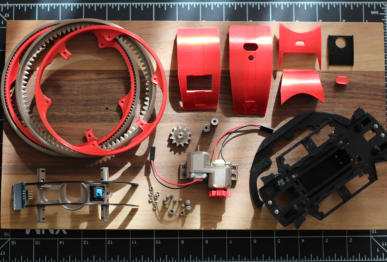
100% of Aptos structure was designed to be 3D printed. All of
the files are available to download on Thingiverse.


Version

1.0
Project

VG01
Team
Omid G, Hetvi P, Ayush D, Ibrahim N
Processing
Wi-Fi
Speaker
Bluetooth


Arm Cortex-M7
600 MHz clock, 7936K Flash, 1024K RAM, 4K EEPROM, 480 Mbit/sec USB Host,
55 digital I/O, 35 PWM output pins, 18 analog input pins, 8 serial, 3 SPI, 3 I2C Ports
ESP8266
Wi-Fi Direct (P2P), soft-AP, Integrated TCP/IP protocol stack, 4MB Flash Memory
CSR 4.0
3 Mbps, up to 33ft/10m, wireless data exchange, EDR compliant
8 Ohm, 0.5W
Camera
OV2640
2 Megapixel lens, 2592x1944 still picture resolution, 1080p video resolution
Display
OLED
0.96”, 128x64 resolution, I2C, 3-5V, 4.5g, ~20mA no backlight required
Accelerometer
MPU-6050
MEMS 3-axis gyroscope + 3-axis accelerometer Digital Motion Processor, I2C, 2.3-
3.4V, Digital-output temperature sensor
Power

Lithium-Ion Polymer (LiPo) Battery
3.7V 6000mAh Stacked, 2-pin JST-PH connector, 84g, long-term self-discharge rate
(<8% per month)


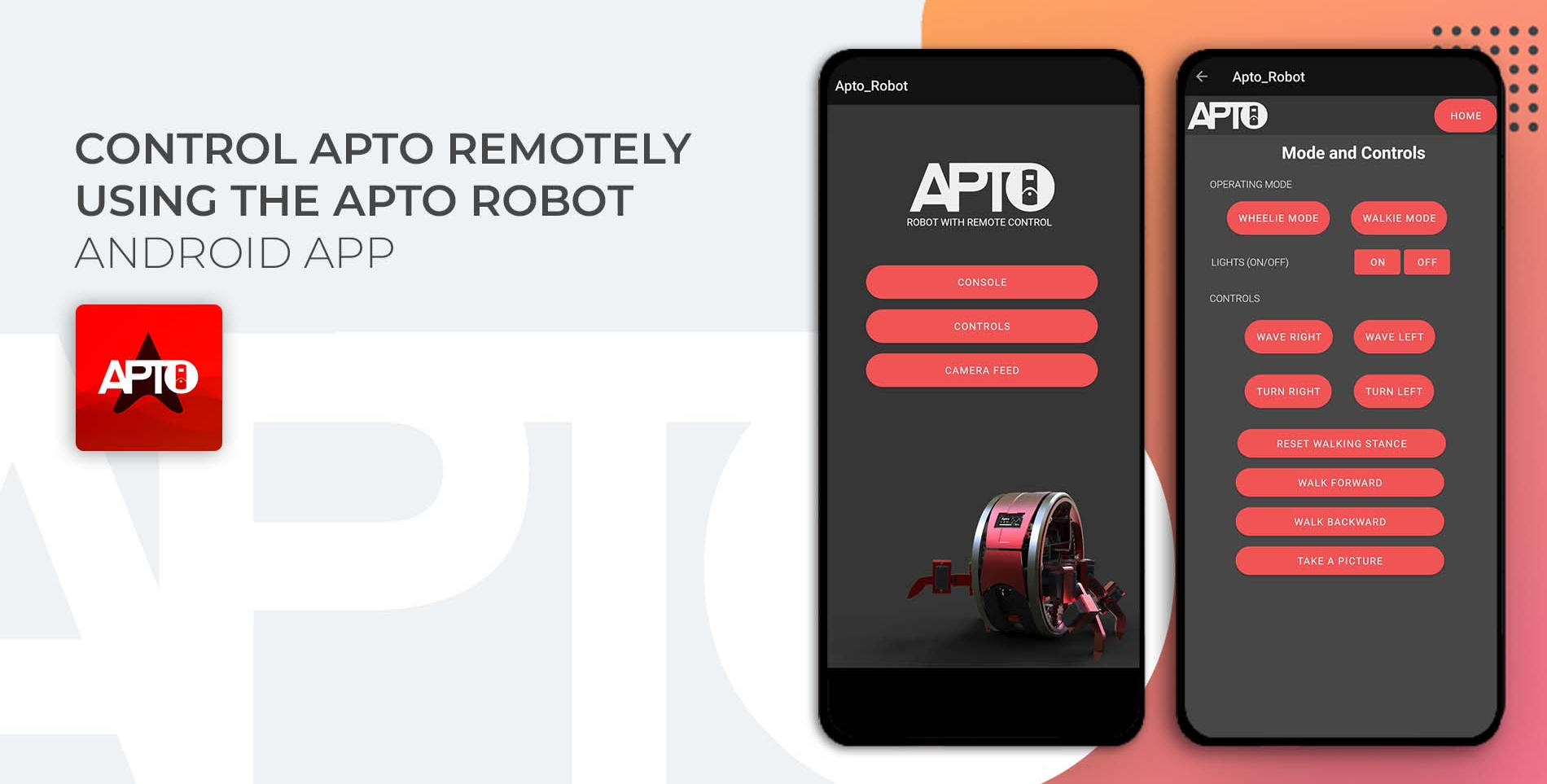
Pair Apto with any Dualshock 3 controller to control it
wirelessly.







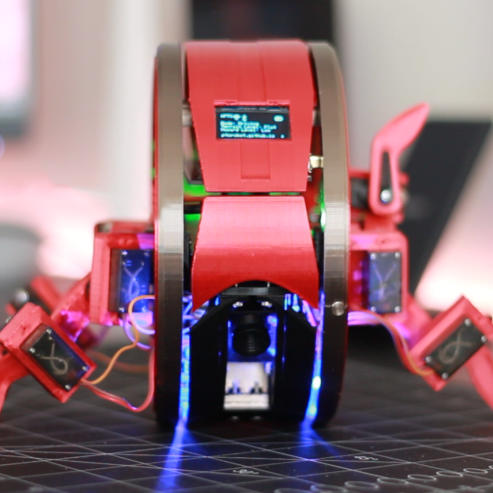







Apto acts as a multi-terrain mobile robot with a variety of applications
ranging from surveillance in dense urban areas to reconnaissance
missions after natural disasters. What's unique about Apto is its small
robust design which allows it to adapt to its surroundings based on the
environment it encounters. In terms of mechanical specifications, Apto
acts as an all terrain quadruped robot and a tank-driven rover when
needed. The combination of both methods of movement allows Apto to
move over even ground at fast speeds or traverse over uneven and
bumpy terrain in a precise manner.
Apto’s unique structural design is equipped with various electrical and
mechanical features, that help it perform the tasks its was created for.
This includes a large rechargable battery for all day use, camera for
vision processing/surveillance, and an inverted turntable bearing design
used for switching between walking and driving modes of operation.
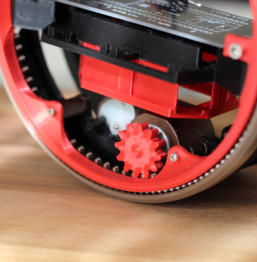
Apto was designed for exploring in various terrains. Equipped with 4
legs made up of 3 servos each, Apto is able to move through uneven
surfaces such as brush, rock, sand, snow and more. Using 3 servos per
arm allows Apto to have 3-degrees of freedom when navigating
through its environment. When on smooth surfaces, the arms retract
and Apto is able to use its two wheels driven by DC motors located at
the base of the robot.
Includes a unique stacked PCB design that accomodates the
hardware necessary to bring Apto to life, while remaining
small enough to fit within the footprint of the robot.

Made up of over 50 custom components, designed for Aptos
unique feature set.
100% of Aptos structure was designed to be 3D printed. All of
the files are available to download on Thingiverse.



Pair Apto with any Dualshock 3 controller to control it
wirelessly.
Enable driving mode to allow Apto to travel faster over smooth
surfaces.

Version

1.0
Project

VG01
Team
Omid G, Hetvi P, Ayush D, Ibrahim N
Processing
Wi-Fi
Speaker
Bluetooth


Arm Cortex-M7
600 MHz clock, 7936K Flash, 1024K RAM, 4K EEPROM, 480 Mbit/sec USB Host,
55 digital I/O, 35 PWM output pins, 18 analog input pins, 8 serial, 3 SPI, 3 I2C Ports
ESP8266
Wi-Fi Direct (P2P), soft-AP, Integrated TCP/IP protocol stack, 4MB Flash Memory
CSR 4.0
3 Mbps, up to 33ft/10m, wireless data exchange, EDR compliant
8 Ohm, 0.5W
Camera
OV2640
2 Megapixel lens, 2592x1944 still picture resolution, 1080p video resolution
Display
OLED
0.96”, 128x64 resolution, I2C, 3-5V, 4.5g, ~20mA no backlight required
Accelerometer
MPU-6050
MEMS 3-axis gyroscope + 3-axis accelerometer Digital Motion Processor, I2C, 2.3-
3.4V, Digital-output temperature sensor
Power

Lithium-Ion Polymer (LiPo) Battery
3.7V 6000mAh Stacked, 2-pin JST-PH connector, 84g, long-term self-discharge rate
(<8% per month)























